 |
|
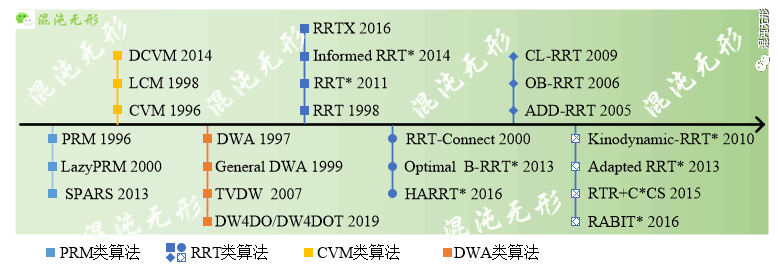
▀\äėęÄäجM┴x╔Ž║═▄ē█EęÄäØĄ─Ė┼─ŅĘŪ│ŻĮėĮ³Ż¼ģ^äeį┌ė┌▓╗═¼Ą─ÖCŲ„╚╦Ą─▀\äėīW/äė┴”īW─Żą═╩Ū▓╗ę╗śėĄ─Ż¼▒╚╚ńČÓ▌SÖCąĄ▒█ĪóęŲäėÖCŲ„╚╦Ą╚Ż¼▀\äėęÄäØąĶę¬ū÷Ą─╩┬Ūķ╩ŪąĶꬎ╚ęÄäØ│÷╔Ž╩÷▄ē█EŪ·ŠĆŻ¼Įėų°ĮY║Žäė┴”īW─Żą═Ż¼īó▄ē█EŪ·ŠĆ▐D╗»×ķ├┐éĆļŖÖCĄ─▀\äė┐žųŲŪ·ŠĆŻ¼┐žųŲļŖÖCčžų°įō┐žųŲŪ·ŠĆ▀\äėŻ¼ęįīŹ¼FÖCŲ„╚╦čžų°ęÄäØĄ──┐ś╦▄ē█EŪ·ŠĆ▀\äėĪŻ ┐šķg▓╔śė╦ŃĘ©┐šķg▓╔śė╦ŃĘ©░┤šš▓╔śė┐šķg▓╗═¼Ż¼┐╔Ęų×ķŻ║ĀŅæB┐šķg▓╔śė║═▀\äė┐šķg▓╔śėĪŻ ╗∙ė┌ĀŅæB┐šķg▓╔śėĄ─╦ŃĘ©─▄ē“į┌┤¾├µĘeĪóGŠĢČ╚Ą─┐šķgųą┐ņ╦┘╔·│╔┬ĘÅĮŻ¼░³└©RRT║═PRMŅÉ╦ŃĘ©Ą╚Ż¼Š▀ėąĖ┼┬╩═ĻéõąįŻ¼Ųõų„ę¬▓Į¾E░³└©ļSÖC▓╔śėĪóČ╚┴┐▀BĮėĪó┼÷ū▓Öz£y║═┬ĘÅĮ▓ķįāĪŻ ╗∙ė┌▀\äė┐šķg▓╔śėĄ─╦ŃĘ©ätį┌╦┘Č╚┐šķgĄ╚ŠÓ▓╔śėŻ¼═©▀^įuār║»öĄ▀xō±Z╝č┐žųŲųĖ┴ŅŻ¼“īäėÖCŲ„╚╦▀\äėŻ¼ų„ę¬░³└©CVMŅÉ╦ŃĘ©╝░DWAŅÉ╦ŃĘ©Ą╚ĪŻ
|
| ░µÖÓ╦∙ėą © ▒▒Š®äōØ╔ųŪ╗█ÖCŲ„╚╦┐Ų╝╝ėąŽ▐╣½╦Š ĄžųĘŻ║▒▒Š® ŪÕ╚A┐Ų╝╝ł@Cū∙╬ÕśŪ ļŖįÆŻ║4006-937-088 Š®ICPéõ20010582╠¢-2 |