 |
|
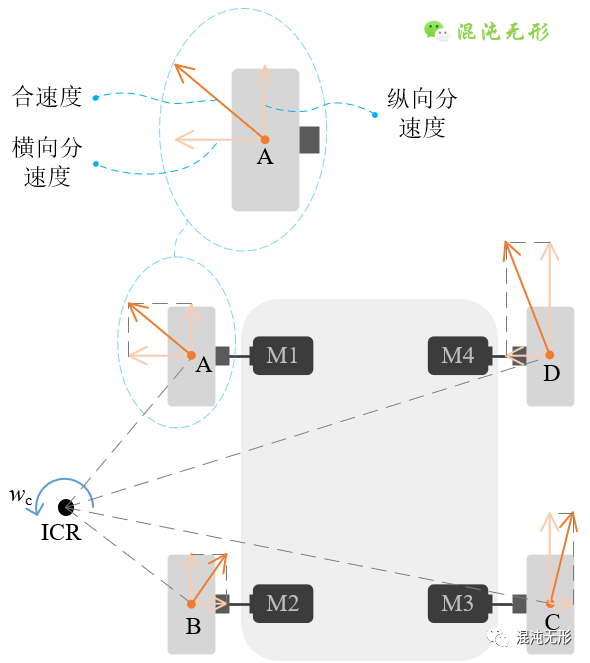
╝┘╚ńÖC(j©®)Ų„╚╦Ą─╦─éĆ(g©©)▌åūė╦┘Č╚ŽÓ═¼Ż¼ätÖC(j©®)Ų„╚╦┐ŽČ©╩Ūū÷ų▒ŠĆ▀\(y©┤n)äė(d©░ng)Ż╗─Ū╝┘╚ń╦─éĆ(g©©)▌åūėĄ─╦┘Č╚▓╗═¼Ż¼ätĢ■(hu©¼)«a(ch©Żn)╔·╩▓├┤ą¦╣¹Ż┐▀@┐╔ģó┐╝ų«Ū░Ą─╬─š┬ĪČā╔▌å▓Ņ╦┘“ī(q©▒)äė(d©░ng)ÖC(j©®)Ų„╚╦ĪĘĄ─Ą┌Č■éĆ(g©©)å¢┤ĪŻ ╚ńłD 1.3╦∙╩ŠŻ¼ų╗ę¬╦─éĆ(g©©)ų„äė(d©░ng)▌åĄ─▐D(zhu©Żn)╦┘▓╗═¼Ż¼ätĢ■(hu©¼)«a(ch©Żn)╔·▐D(zhu©Żn)Ž“▀\(y©┤n)äė(d©░ng)Ż¼ę╗Ą®«a(ch©Żn)╔·▐D(zhu©Żn)Ž“▀\(y©┤n)äė(d©░ng)Ż¼ęŌ╬Čų°┤µį┌ą²▐D(zhu©Żn)ųąą─Ż©łDųąICRŻ®Ż¼╦─éĆ(g©©)▌åūė┼cĄž├µĮėė|³c(di©Żn)Ż©łDųą³c(di©Żn)AŻ®Ą─ŽÓī”▀\(y©┤n)äė(d©░ng)╦┘Č╚ĘĮŽ“ät╚ńłD 1.3╦∙╩ŠŻ¼║Ž╦┘Č╚ĘĮŽ“┼cŠĆČ╬A-ICRŽÓ╗ź┤╣ų▒Ż¼Č°▌å╠źų╗─▄čžų°┐vŽ“Ęų╦┘Č╚ĘĮŽ“▐D(zhu©Żn)äė(d©░ng)Ż¼ū÷╦┘Č╚ĘųĮŌ┐╔ų¬Ż¼▀Ć┤µį┌čž▌åūė▌SŽ“Ż©ļŖÖC(j©®)▌SŽ“Ż®Ą─ÖMŽ“Ęų╦┘Č╚Ż¼ė╔ė┌╦─éĆ(g©©)▌å╠źĄ─ÖMŽ“Ęų╦┘Č╚┤¾ąĪ▓╗═¼Ż¼ę“┤╦ÖC(j©®)Ų„╚╦Ģ■(hu©¼)«a(ch©Żn)╔·ą²▐D(zhu©Żn)Ęų▀\(y©┤n)äė(d©░ng)Ż¼Č°┐vŽ“Ęų╦┘Č╚«a(ch©Żn)╔·┐vŽ“Ęų▀\(y©┤n)äė(d©░ng)Ż¼║Ž│╔▀\(y©┤n)äė(d©░ng)ät▒Ē¼F(xi©żn)×ķÖC(j©®)Ų„╚╦└@ICRū÷łAų▄▀\(y©┤n)äė(d©░ng)ĪŻ ▀M(j©¼n)ę╗▓ĮĘų╬÷┐╔ų¬Ż¼ÖMŽ“Ęų╦┘Č╚╩Ūė╔▌å╠ź┼cĄž├µĄ─╗¼äė(d©░ng)─”▓┴┴”«a(ch©Żn)╔·Ą─Ż¼┐vŽ“Ęų╦┘Č╚╩Ūė╔▌å╠ź┼cĄž├µĄ─ØLäė(d©░ng)─”▓┴┴”«a(ch©Żn)╔·Ą─Ż¼╦∙ęį▐D(zhu©Żn)Ž“▀\(y©┤n)äė(d©░ng)╩Ū┐┐╗¼äė(d©░ng)─”▓┴«a(ch©Żn)╔·Ą─ĪŻ┤╦═ŌŻ¼▀Ć┐╔ų¬ļŖÖC(j©®)▌ö│÷▐D(zhu©Żn)Šž“ī(q©▒)äė(d©░ng)▌åūė▐D(zhu©Żn)äė(d©░ng)Ż¼ę“┤╦ØLäė(d©░ng)─”▓┴╩Ūė╔ļŖÖC(j©®)ų„äė(d©░ng)«a(ch©Żn)╔·Ą─Ż¼Č°╗¼äė(d©░ng)─”▓┴╩Ūė╔ė┌╦─éĆ(g©©)▌åūė╦┘Č╚▓╗ę╗ų┬Č°▒╗äė(d©░ng)«a(ch©Żn)╔·Ą─ĪŻ Å─┴”║═┴”ŠžĄ─ĮŪČ╚└ĒĮŌŻ║ė╔ė┌╦─éĆ(g©©)ļŖÖC(j©®)▌ö│÷┴”Šž▓╗═¼Ż¼ī¦(d©Żo)ų┬╦─éĆ(g©©)▌å╠ź┼cĄž├µĮėė|³c(di©Żn)Ą─ū„ė├┴”▓╗═¼Ż¼▒M╣▄ļŖÖC(j©®)«a(ch©Żn)╔·ū„ė├┼c▌å╠źĄ─┴”Ą─ĘĮŽ“Š∙čžų°┐vŽ“ĘĮŽ“Ż¼Ą½┤¾ąĪ▓╗═¼Ż¼ė╔ė┌╦─éĆ(g©©)┴”Ą─┤¾ąĪ▓╗═¼Ż¼ę▓Š═ęŌ╬Čų°ÖC(j©®)Ų„╚╦▓╗─▄ŲĮĘĆ(w©¦n)ų▒ŠĆ▀\(y©┤n)äė(d©░ng)Ż¼┐ŽČ©Ģ■(hu©¼)«a(ch©Żn)╔·▄ć╔ĒĄ─Ų½▐D(zhu©Żn)Ż¼Ą½ė╔ė┌▌å╠źų╗─▄ØLäė(d©░ng)Ż¼╦∙ęį▐D(zhu©Żn)Ž“▀\(y©┤n)äė(d©░ng)Š═ų╗─▄┐┐╗¼äė(d©░ng)┴╦
łD 1.3 SSMRĄ─╦┘Č╚ĘųĮŌ.ICR(Instantaneous Center of Rotation)▒Ē╩Šą²▐D(zhu©Żn)ųąą─.³c(di©Żn)A▒Ē╩Š▌å╠ź┼cĄž├µĄ─└ĒŽļĮėė|³c(di©Żn). ═©▀^ī”å¢Ņ}1Ą─Ęų╬÷Ż¼╬ęéāų¬Ą└╦─▌å“ī(q©▒)äė(d©░ng)ÖC(j©®)Ų„╚╦(SSMR)╩Ū┐┐╗¼äė(d©░ng)▐D(zhu©Żn)Ž“Ą─Ż¼ŽÓ▒╚ė┌ØLäė(d©░ng)─”▓┴Ż¼╗¼äė(d©░ng)─”▓┴ī”▌å╠źĄ─ōp║─J┤¾Ż¼ė╚Ųõ╩Ūį┌╦«─ÓĄ╚ė▓┘|(zh©¼)┬Ę├µŻ¼╚ńłD 1.4╦∙╩ŠŻ¼╦─▌å“ī(q©▒)äė(d©░ng)ÖC(j©®)Ų„╚╦į┌╦«─Ó┬Ę├µ┴¶Ž┬Ą─▌å╠ź─ź║█ĪŻ╦∙ęį╦─▌å“ī(q©▒)äė(d©░ng)ÖC(j©®)Ų„╚╦│Ż▒╗ė├ė┌ę░═ŌŁh(hu©ón)Š│Ż¼ę“?y©żn)ķ─Ó═┴Ąž├µ▒╚▌^╦╔▄øŻ¼╗¼äė(d©░ng)▐D(zhu©Żn)Ž“Ģr(sh©¬)ī”▌å╠źĄ──źōp£pąĪŻ¼Ūę╦─éĆ(g©©)▌å╠źd┴ó“ī(q©▒)äė(d©░ng)Ż¼Ī░ūźĄž┴”Ī▒ÅŖ(qi©óng)Ż¼┐╔Ī░▌p╦╔Ī▒įĮ▀^ę╗░ŃšŽĄKĪŻ ╗∙ė┌╔Ž╩÷Ęų╬÷Ż¼╦─▌å“ī(q©▒)äė(d©░ng)ÖC(j©®)Ų„╚╦(SSMR)ū÷ų▒ŠĆ╗“łAų▄▀\(y©┤n)äė(d©░ng)╩Ūė╔╦─éĆ(g©©)▌åūėĄ─▐D(zhu©Żn)╦┘╣▓═¼øQČ©Ą─Ż¼ę“┤╦ąĶę¬┬ō(li©ón)║Ž┐žųŲ╦─éĆ(g©©)ļŖÖC(j©®)▐D(zhu©Żn)äė(d©░ng)ĪŻ
|
| ░µÖÓ(qu©ón)╦∙ėą © ▒▒Š®äō(chu©żng)Ø╔ųŪ╗█ÖC(j©®)Ų„╚╦┐Ų╝╝ėąŽ▐╣½╦Š ĄžųĘŻ║▒▒Š® ŪÕ╚A┐Ų╝╝ł@Cū∙╬ÕśŪ ļŖįÆŻ║4006-937-088 Š®ICPéõ20010582╠¢-2 |