 |
|
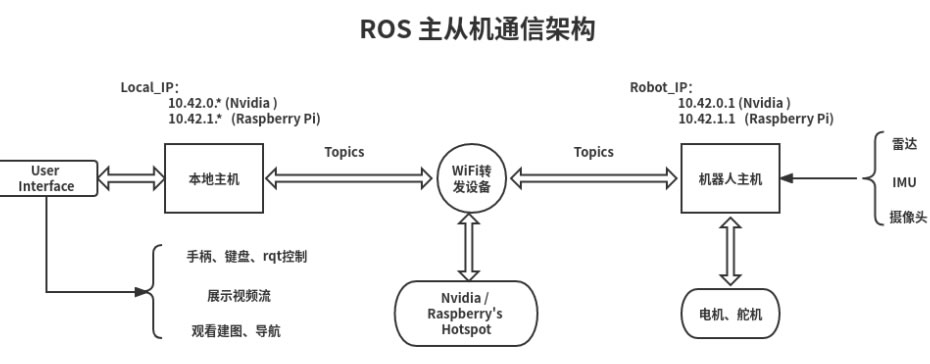
░ó┐╦┬³▌å╩ĮÖC(j©®)Ų„╚╦Ąū▒PąĪ▄ć▒ŠąĪ▄ć╩╣ė├┴╦ ROS1 Melodic ųąĄ─ų„Å─ÖC(j©®)═©ėŹŻ¼ÖC(j©®)Ų„╚╦▒╗įO(sh©©)ų├×ķ┴╦ų„ÖC(j©®)Ż©masterŻ®Ż¼┐╔ęįį┌═¼Šųė“ŠW(w©Żng)Ž┬Ą─Å─ÖC(j©®)Ż©slaveŻ®ųąėåķå╗“š▀░l(f©Ī)▓╝ROSöĄ(sh©┤)ō■(j©┤)ĪŻ
░ó┐╦┬³▌å╩ĮÖC(j©®)Ų„╚╦Ąū▒PąĪ▄ćĄ─╝▄śŗ(g©░u)╚ńŽ┬
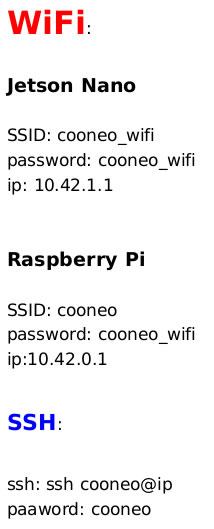
╔Ž╬╗ÖC(j©®) Ż║śõ▌«┼╔ ╗“š▀ Jetson nano ╗“š▀ ╣ż┐žÖC(j©®)Ą╚Ż╗ Ž┬╬╗ÖC(j©®)Ż║ė╔ Arduino mega 2560 + ūįčąöU(ku©░)š╣░Õ + ļŖÖC(j©®) + ȵÖC(j©®) + ¤¶╣Ō + ║Į─Ż▀b┐ž + įŲ┼_Ą╚śŗ(g©░u)│╔Ą─ŠC║Ž¾wŻ╗ ļŖį┤ķ_ĻP(gu©Īn)Ż║─┐Ū░š¹▄ćļŖį┤üĒūį3╣Ø(ji©”)18650ļŖ│ž┤«┬ō(li©ón)śŗ(g©░u)│╔12.6 v ļŖį┤Ż¼ļŖį┤ė╔ę╗├Čå╬ĄČļpų├ķ_ĻP(gu©Īn)śŗ(g©░u)│╔Ż¼ķ_ĻP(gu©Īn)ę╗Č╦ī¦(d©Żo)═©š¹▄ćļŖį┤Ż¼┴Ē═Ōę╗Č╦ī¦(d©Żo)═©│õļŖļŖ┬ĘŻ╗ ļŖį┤│õļŖŻ║╩╣ė├ 12.6V / 1A Ę└▀^ø_│õļŖŲ„│õļŖŻ¼│õļŖĢrąĶīóå╬ĄČļpų├ķ_ĻP(gu©Īn)Ļ■ĄĮ│õļŖļŖ┬Ęę╗é╚(c©©)Ż¼┤╦Ģrš¹▄ćöÓļŖŻ¼│õļŖŲ„’@╩Š╝t¤¶Ż¼│õØMų«║¾Ģ■’@╩ŠŠG¤¶Ż╗ Jetson nano ėą┼õéõŅ~═ŌĄ─ 12V / 5A │õļŖŲ„Ż¼ĘĮ▒ŃąĪ▄ćį┌│õļŖĄ─Ģr║“Ż¼ę▓┐╔ęį╩╣ė├ÖC(j©®)Ų„╚╦ų„ÖC(j©®)ĪŻ Raspberry Pi ätąĶę¬ėą 5V / 2.5A Ą─ļŖį┤Ż¼▒╚▌^│ŻęŖŻ¼─¼šJ(r©©n)ø]ėąŅ~═Ō┼õų├ĪŻ ┤“ķ_▒ŠĄžubuntuŻ¼▀BĮėÖC(j©®)Ų„╚╦ų„ÖC(j©®)Ą─ Wifi Ż¼┐╔ęį╩Ūśõ▌«┼╔╗“š▀╩Ū Jetson nano Š∙┐╔Ż¼ų╗╩Ūā╔š▀Ą─ipČ╬▓╗ę╗ų┬Ż¼╩ŠęŌłD╚ńŽ┬Ż║
ĖĮĦ│╠ą“ųąĄ─┤·┤a╬─╝■ Ż║ ┤·┤aŻ║ Local_PC/catkin_ws : Ę┼ų├į┌▒ŠĄžČ╦ ubuntu Ą─ home ─┐õøŽ┬Ż╗ Robot_PC/catkin_ws : Ę┼ų├į┌ÖC(j©®)Ų„╚╦ų„ÖC(j©®)Ą─ home ─┐õøŽ┬Ż╗
|
| ░µÖÓ(qu©ón)╦∙ėą © ▒▒Š®äō(chu©żng)Ø╔ųŪ╗█ÖC(j©®)Ų„╚╦┐Ų╝╝ėąŽ▐╣½╦Š ĄžųĘŻ║▒▒Š® ŪÕ╚A┐Ų╝╝ł@Cū∙╬ÕśŪ ļŖįÆŻ║4006-937-088 Š®ICPéõ20010582╠¢-2 |