 |
|
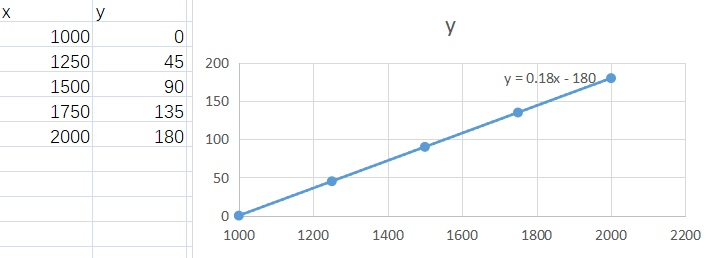
Ą├ĄĮ┴╦PPMĄ─ą┼╠¢öĄō■Ż¼╚ń║╬└¹ė├ŲõųĄüĒ┐žųŲȵÖC▀Mąą▐Däė─žŻ┐ Ž╚ę¬īóĄ├ĄĮĄ─PPMĖ„═©Ą└ųĄ┼cȵÖCPWMĄ─▒╚▌^ųĄ▀Mąąī”æ¬Ż¼ęįįOų├ȵÖCPWMĄ─š╝┐š▒╚üĒ▐Däė▓╗═¼Ą─ĮŪČ╚ĪŻ┐╔ęįĖ∙ō■śĘĄŽ▀b┐žŲ„├┐éĆōuŚUĄ─ȵ┴┐┤¾ąĪüĒŲź┼õŽÓī”æ¬Ą─ĮŪČ╚Ż¼Į©ūhīóōuŚU╬╗ė┌ųąķg╬╗ų├Ģrī”æ¬ČµÖCĄ─90ĪŃŻ¼═©▀^╔Ž═Ų╗“Ž┬└ŁōuŚUĄ─ĘĮ╩Įį÷╝ė╗“£p╔┘ȵ┴┐Ż¼ęį┐žųŲȵÖC▀Mąą▐DäėĪŻ ąĶę¬ūóęŌŻ¼ČµÖCĄ─▐DäėĮŪČ╚ĘČć·×ķ0ĪŃ~180ĪŃŻ¼ę“┤╦į┌▀MąąŲź┼õĢr▓╗─▄│¼│÷ȵÖCĄ─▐DäėĘČć·ĪŻ«öŪ░ū„š▀īó├┐éĆ═©Ą└Ą─ȵ┴┐įOų├×ķ1000~2000Ż¼╝┤«öȵ┴┐┤¾ąĪ×ķ1000Ģrī”æ¬ČµÖCĮŪČ╚×ķ0ĪŃŻ¼«öȵ┴┐×ķ2000Ģrī”æ¬ČµÖCĮŪČ╚×ķ180ĪŃŻ¼═¼Ģrīóȵ┴┐×ķ1500ī”æ¬×ķȵÖCĄ─90ĪŃĪŻūóęŌŻ¼į┌īŹļH╩╣ė├Ģr欫öįOų├ę╗Č©Ą─▀b┐žĪ░╦└ģ^Ī▒Ż¼╝┤«öȵ┴┐╬╗ė┌Ī░╦└ģ^Ī▒ĘČć·ā╚ĢrȵÖC╚į▒Ż│ų▓╗äėŻ¼▒▄├Ōę“×ķ▀^ė┌ņ`├¶įņ│╔ȵÖCŅlĘ▒äėū„Č°ę²ŲČČäėĄ─ŪķørĪŻ Ė∙ō■ȵ┴┐┼cȵÖCĮŪČ╚Ą─ī”æ¬┤¾ąĪŻ¼┐╔ęįĄ├ĄĮęįŽ┬║»öĄĻPŽĄŻ║ y=0.18x-180
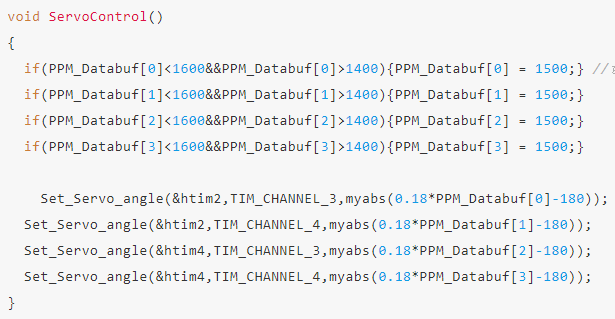
╚╗║¾═©▀^š{ė├ȵÖCĮŪČ╚įOų├Ą─║»öĄŻ¼ī”ȵÖC▀Mąą┐žųŲŻ¼īŹ¼F┤·┤a╚ńŽ┬Ż║
īó│╠ą“Ž┬▌dĄĮÖCŲ„╚╦┐žųŲ░Õ╔ŽŻ¼░┤šš╔Ž╬─ųąĄ─ĘĮĘ©▀BĮė║├Įė╩šÖCŻ¼▓óĮė╚ļ╦─┬ĘȵÖCĪŻ╚╗║¾┤“ķ_▀b┐žŲ„Ż¼Š═┐╔ęį┐┤ĄĮ╩╣ė├▀b┐ž┐žųŲ╦─┬ĘȵÖCĄ─ą¦╣¹└▓ŻĪ
|
| ░µÖÓ╦∙ėą © ▒▒Š®äōØ╔ųŪ╗█ÖCŲ„╚╦┐Ų╝╝ėąŽ▐╣½╦Š ĄžųĘŻ║▒▒Š® ŪÕ╚A┐Ų╝╝ł@Cū∙╬ÕśŪ ļŖįÆŻ║4006-937-088 Š®ICPéõ20010582╠¢-2 |